In Brief
- Robotic prostheses can already restore some level of function, but they don’t often feel natural.
- Researchers at the MIT Biomechatronics Lab have been developing lower limb prostheses that feel like a natural extension of the human body.
- These robotic limbs use a variety of different techniques to ensure comfort as well as restoration of function to an amputee.
Imagine you’re a rock climber on the icy slopes of Mount Washington in New Hampshire. Suddenly, you and your friend are caught in a blizzard. You become disoriented and spend three days in bitter, freezing temperatures of minus 20 degrees Fahrenheit. By the time you’re rescued, you’ve suffered extreme frostbite and need to have both of your legs amputated below the knees. Will you ever climb again? Will your disability greatly reduce your quality of life? This was the situation faced by Dr. Hugh Herr, prodigy rock climber whose double amputation didn’t prevent him from pursuing his passion.
After months of rehabilitation and surgery, Dr. Herr went on to fit himself with varying types of stiff prosthetic limbs to enhance his climbing abilities. These included legs with hooks to navigate narrow crevices and soles with spikes to ascend near-vertical ice walls. Today Dr. Herr works at the MIT Biomechatronics Lab, helping build better prosthetic limbs for amputees that not only function well, but also feel like a natural extension of the body.
Over the past few decades, there have been several advancements in a variety of technological fields including biotechnology, weaponry and machine learning. The field of prosthetics has seen similar advancements as well. We’ve increased our understanding of the human muscular system. Better motors and electronic components have also been developed. But the task of integrating all these components to create a fully-fledged robotic prosthesis poses multiple challenges.
The base functionality for a lower-extremity robotic prosthetic limb consists of its ability to control three basic variables: joint position, speed and torque. By accurately controlling these variables, a prosthetic limb would be able to function very closely to an organic one. In addition to allowing the amputee to walk, another desirable property of a prosthetic leg is that it needs to feel natural.
This is a problem the MIT Biomechatronics lab, led by Dr. Herr, has been working towards solving. They use sophisticated surgeries to improve proprioception, which is the perception or awareness of a body part. After the robotic limbs are placed, external sensors are attached to the person’s skin at the site of the amputation. These sensors communicate with nerve signals to provide instructions to the robotic limbs.
“These sensors detect muscle contraction, providing information that we can use to proportionally move the robotic parts”, says Tony Shu, a graduate student working in the MIT Biomechatronics Lab. “My work mostly concerns neural control of movement: building mathematical models and simulations to understand how we can map neural signals to movements of the robotic limb.”
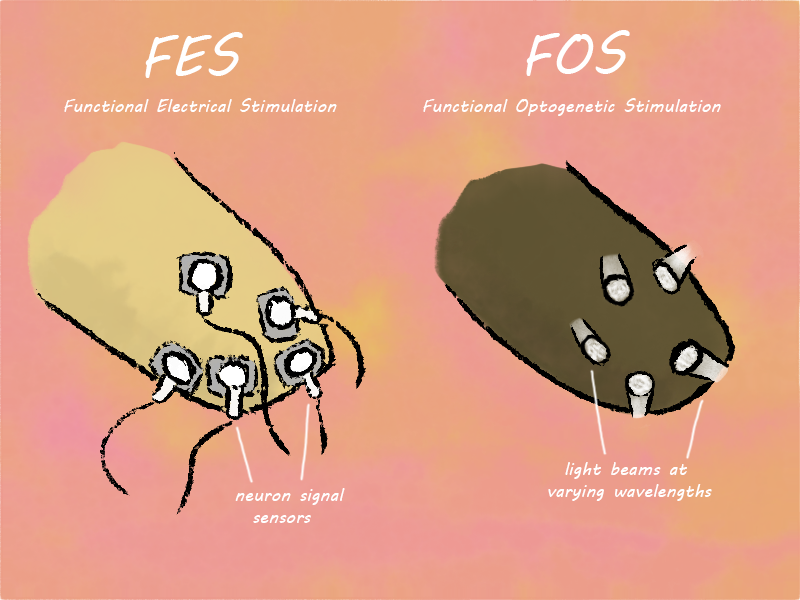
There are two major ways the movement of robotic limbs can provide tactile feedback for the user. The conventional method, named functional electrical stimulation (FES), uses electrical signals to send feedback to the user. However, more recent research is taking place in the field of optogenetics, where beams of light are produced at certain wavelengths to stimulate muscular tissue. This method is known as functional optogenetic stimulation (FOS) and may hold numerous benefits over FES. Some of these potential benefits include: greater accuracy, lower overshoot percentages (reduced magnitude of overstimulation), and reduced fatigue. However, there’s still much work to be done before FOS can reliably be used in prosthetic limbs.
But the impact of these developments in biomechatronics extend beyond making people stronger, faster or even restoring ability. They are a testament to the enduring spirit of humanity and the remarkable ability of the human brain to constantly adapt and overcome adversity.
“Every person should have the right to live life without a disability if they so choose. As a society we can accept these rights, if we accept the proposition that humans are not disabled. A person can never be broken,” explained Dr. Herr in a 2014 TED Talk. “We the people need not accept our limitations, but can transcend disability through technological innovation.”
Content expert:
Tony Shu is a graduate student within the Program in Media Arts and Sciences at MIT. He holds a B.S in Materials Science and Engineering with a minor in Computing and Artificial Intelligence from the Georgia Institute of Technology. As an undergraduate, Tony conducted research in the areas of biodegradable nanocomposite synthesis, superalloy additive manufacturing and transfemoral prosthesis control. His current research leverages biomechanical models to enable intuitive control of external devices through native body signals.
Sources
Escamilla-Nunez, R., Michelini, A., & Andrysek, J. (2020). Biofeedback Systems for Gait Rehabilitation of Individuals with Lower-Limb Amputation: A Systematic Review. Sensors (Basel, Switzerland), 20(6), 1628. https://doi.org/10.3390/s20061628<
Fox, D. (2018). The Brain, Reimagined. Scientific American. https://science.nichd.nih.gov/confluence/download/attachments/117212433/Brain_Cells_Communicate_with_Mechanical_Pulses_-_Fox_2018.pdf?version=1&modificationDate=1521733175000&api=v2
>Herr, H. (2014). The new bionics that let us run, climb and dance [Video]. TED: Ideas worth spreading. https://www.ted.com/talks/hugh_herr_the_new_bionics_that_let_us_run_climb_and_dance
Shu, T. (2019). Coordination of Lower Limb Movement Utilizing the Agonist-Antagonist Myoneural Interface. MIT. https://dam-prod.media.mit.edu/x/2019/08/15/tonyshu-ms-19.pdf
Yatvitskiy, J. (2019, August 20). Mind-controlled movement: Advancements in the Field of prosthetics. curiousSCIENCEwriters. https://curioussciencewriters.org/2019/08/19/mind-controlled-movement-advancements-in-the-field-of-prosthetics/
Chief Editor: Shivani Patel
Team Editor: Siddharth Satish
Creative Team Manager: Maya Hofstetter
Social Media Team Manager: Karishma Goswami
Image credits: Bebe Lemanowicz
This article was written by Shrey Joshi. Shrey and the cSw student editing team would like to thank Stacy Brooks for serving as a mentor on this story. Stacy is the Director of Communications and Social Media at the American Physiological Society (APS). She is also editor-in-chief of The Physiologist Magazine. As always, before leaving a response to this article, please view our Rules of Conduct. Thanks! -cSw Editorial Staff